Flipping
For this lab I chose to flip my robot. I set-up a case called DO_FLIP in the arduino code in which I send my robot forwards at max PWM for a fixed period of time and then immediately reverse it at max PWM. This proved quite effective in getting my robot to flip. I test ran it a few times and realized that I needed to add some weight to the front of the car to enable it to flip better. I also removed the taped I had put on the wheels of my car (I initially wanted to try the drift) to allow the wheels to gain more traction to initiate the flip. The battery charge level also seemed to affect the flip if the robot did not move fast enough at max PWM.
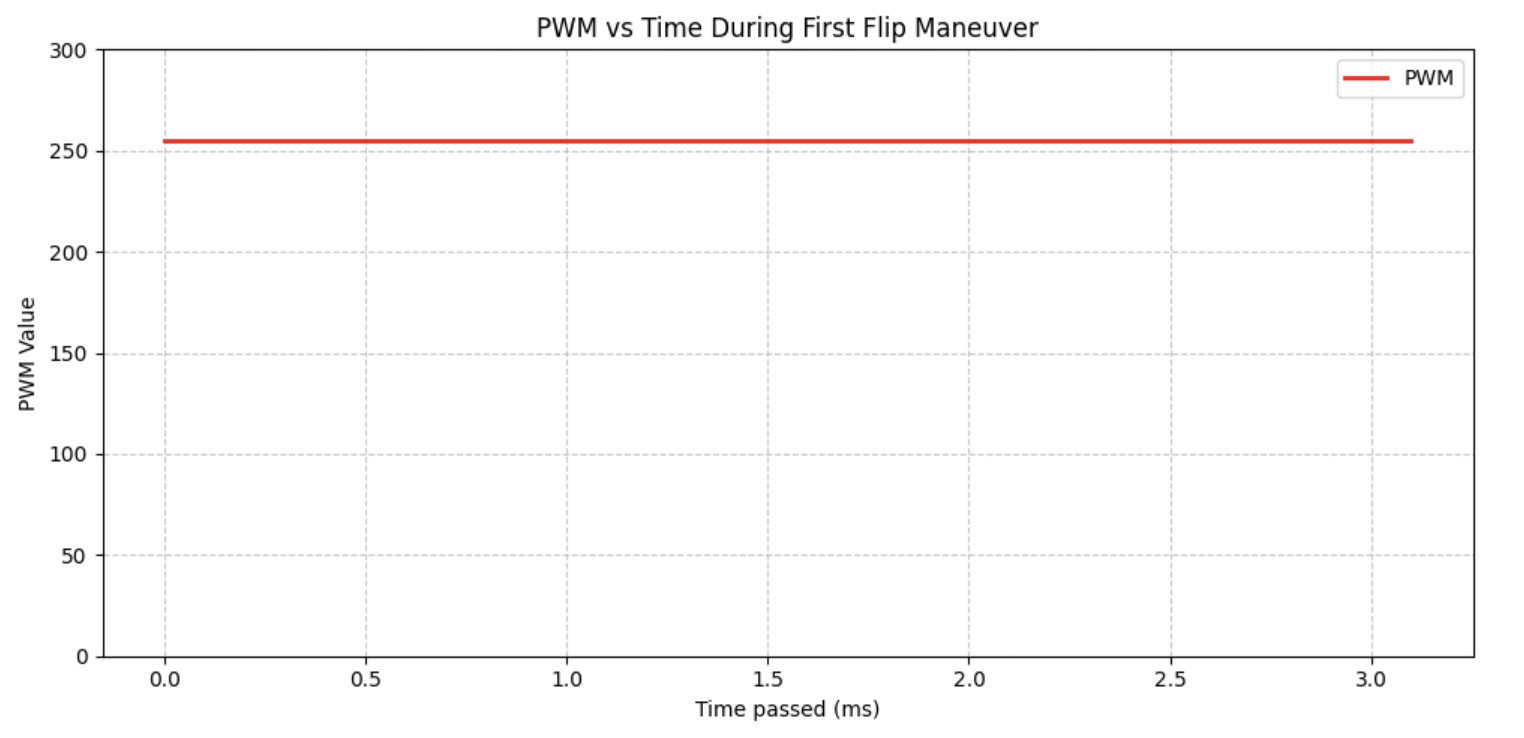
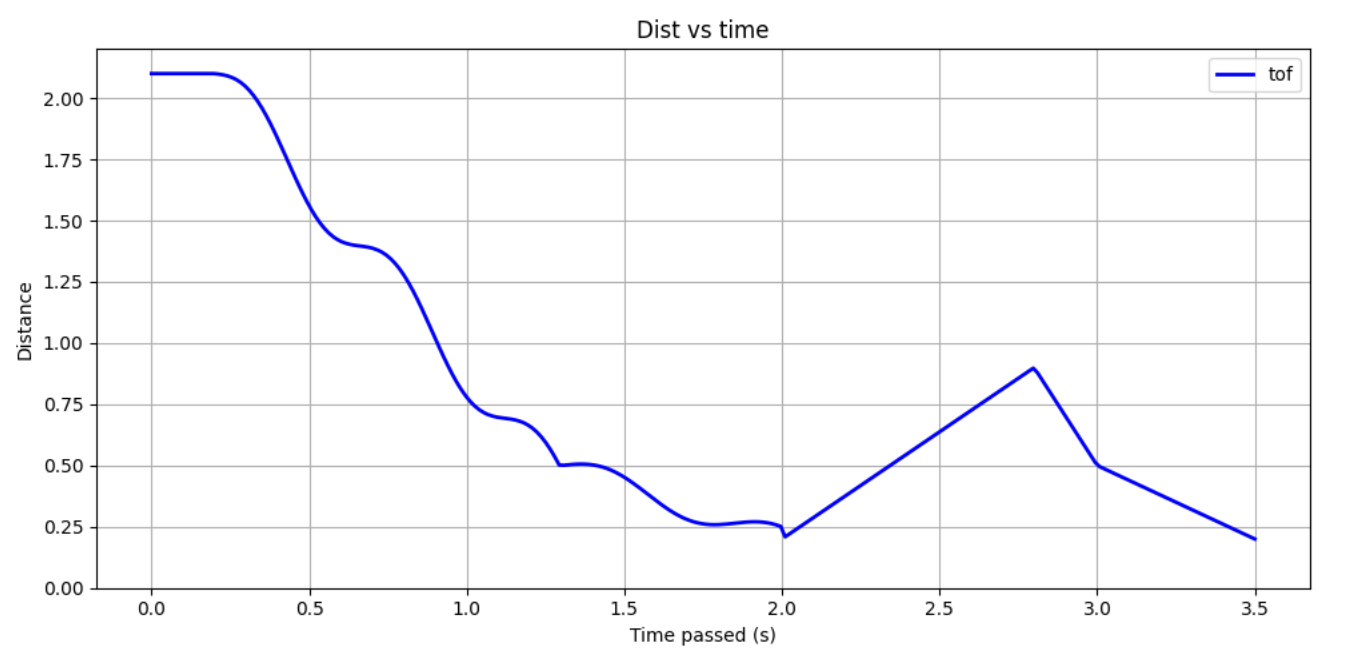
This is the first flip. From start to finish it took a total of 3.1 ms.
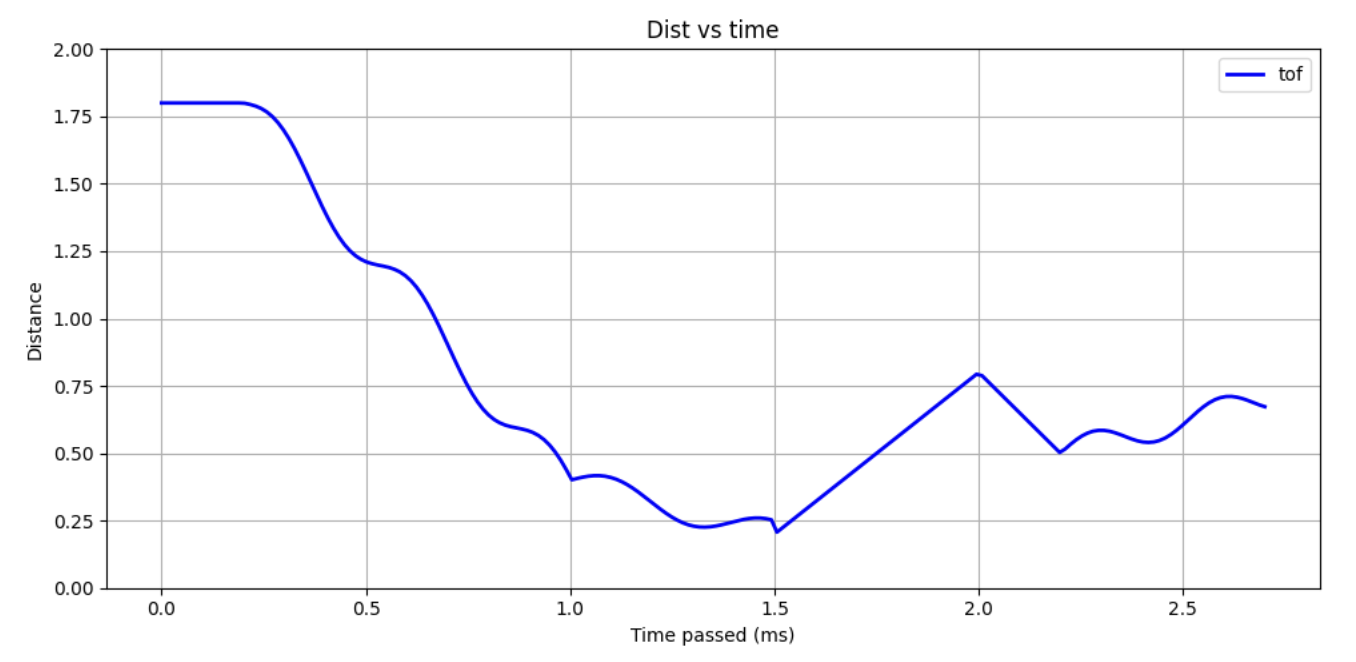
This is the second flip. This flip was slightly faster and took 2.7 ms.
This is my final flip which took 2.6 ms.
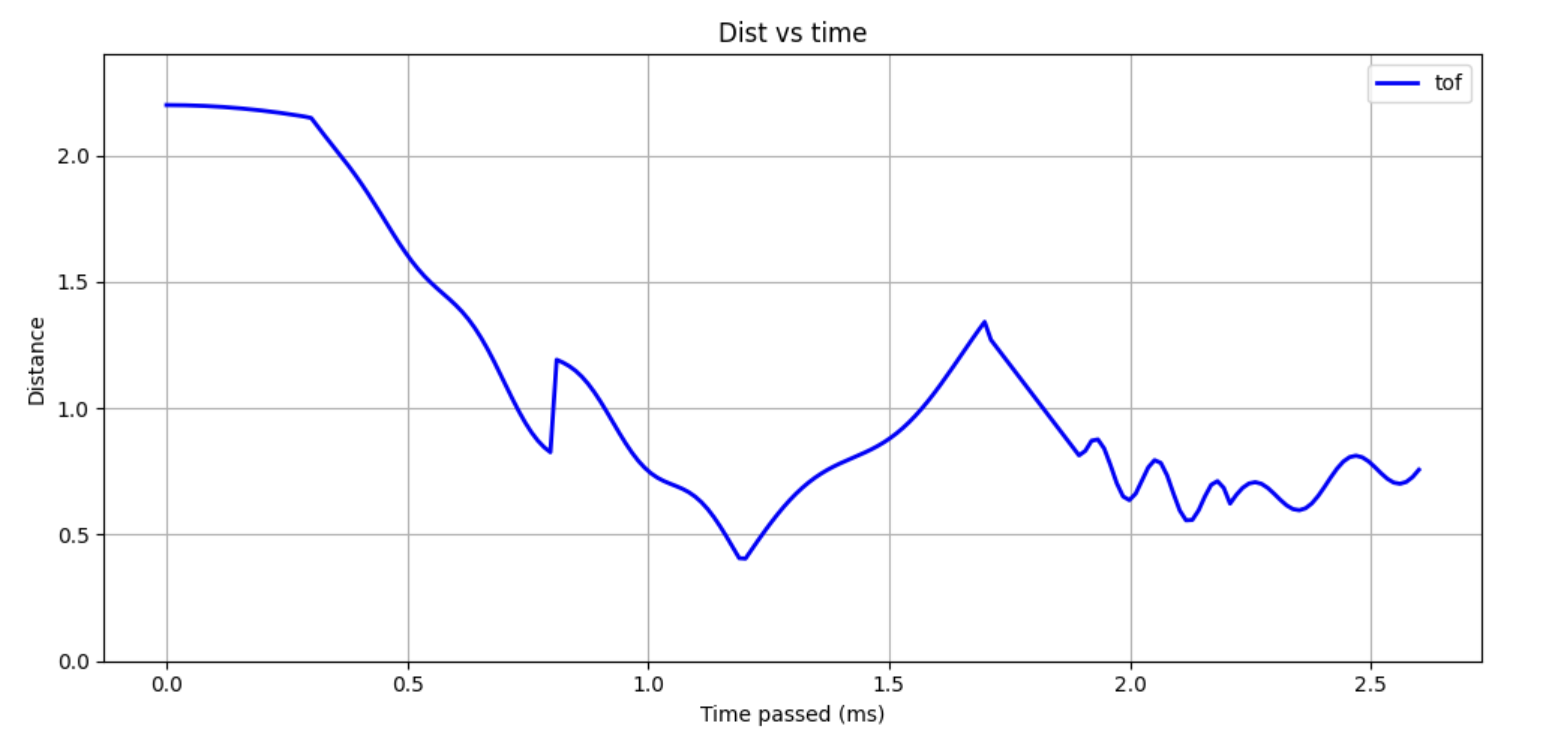
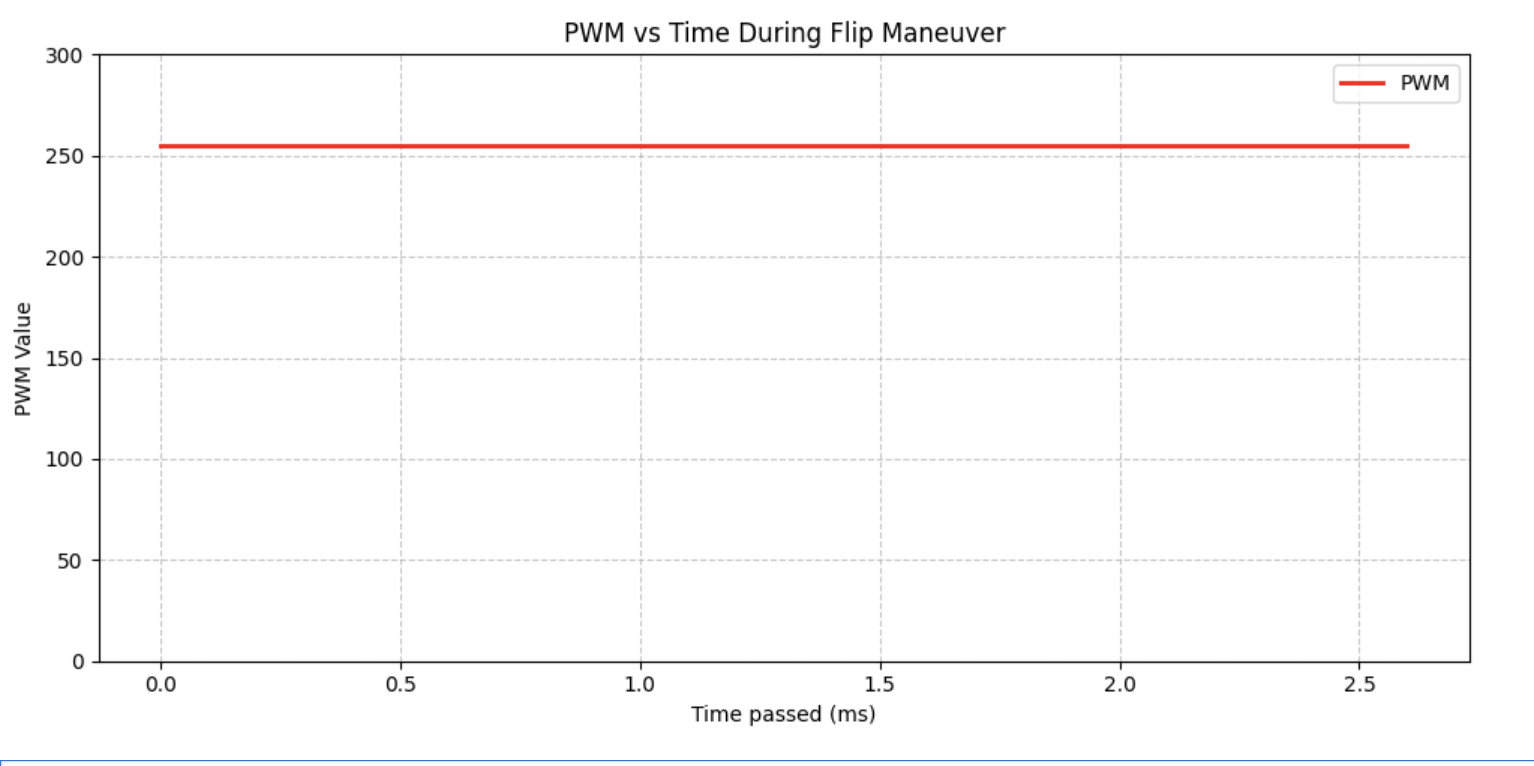
I then sent the forwards and backwards data separately and got the following plots for the 3 flips.